Haptic Proximity Module:Open Source Assistive Technology for the Vision Impaired
Title Count: 11 words
Abstract:
Low Vision (LV) is a form of vision impairment that involves irreversible vision loss; it is significantly reduced vision but not blindness and is still usable vision. According to the World Health Organisation, LV affects 246 million people worldwide and their Quality of Life.
The findings of a study of LV, its effects on an individual’s functional independence and available assistive technologies, showed that:
- People with LV are still reasonably independent within the home, albeit with learned coping methods, however, outside of the home this independence begins to deteriorate.
- Available products are either too expensive and are specific in application; there are no cheap and readily available haptic device that extended a LV user’s perception of distance and objects within their surrounding.
How can both of these findings be addressed to positively impact the interaction of a LV user with their surroundings?
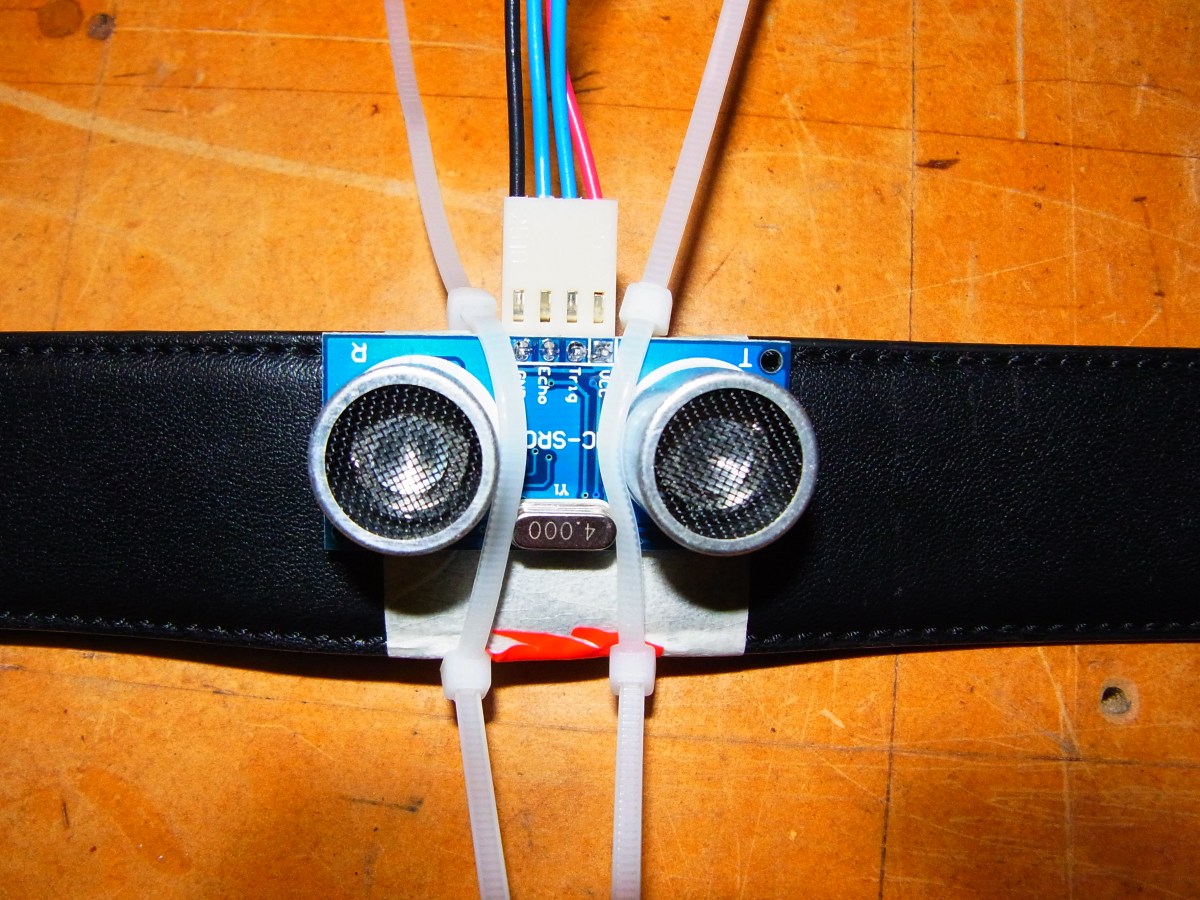
Development of an open-source Haptic Proximity Module (HPM) began with the intention of enabling a LV user to engage their immediate environment for approximately $50 AUD. This approach incorporates off-the-shelf components and can be acquired as a DIY kit or pre-assembled unit, while contributing to the discourse on wearable assistive technologies (AT).
Abstract Count: 196 words
Keywords: Assistive Technology (AT), Do-It-Yourself (DIY), Low Vision (LV), Haptic Proximity Module (HPM).
Keywords Count: 12 words