
Haptic Proximity Module for Low Vision Users
Durable Visual Record (DVR) [honours thesis] can now be viewed at Academia.edu!
Ddownload link: IMRAN_DVR
Haptic Proximity Module for Low Vision Users
Durable Visual Record (DVR) [honours thesis] can now be viewed at Academia.edu!
Ddownload link: IMRAN_DVR

Final A0 graduate exhibition poster. Simple with a hero-shot, abstract and link to my instructables! Here’s the Exhibition Poster.


Finally made the HPM in strip board an instructables. Hopefully it will grow and develop as people engage with it!

On the way to an instructables.com tute! first run with the custom pcb.
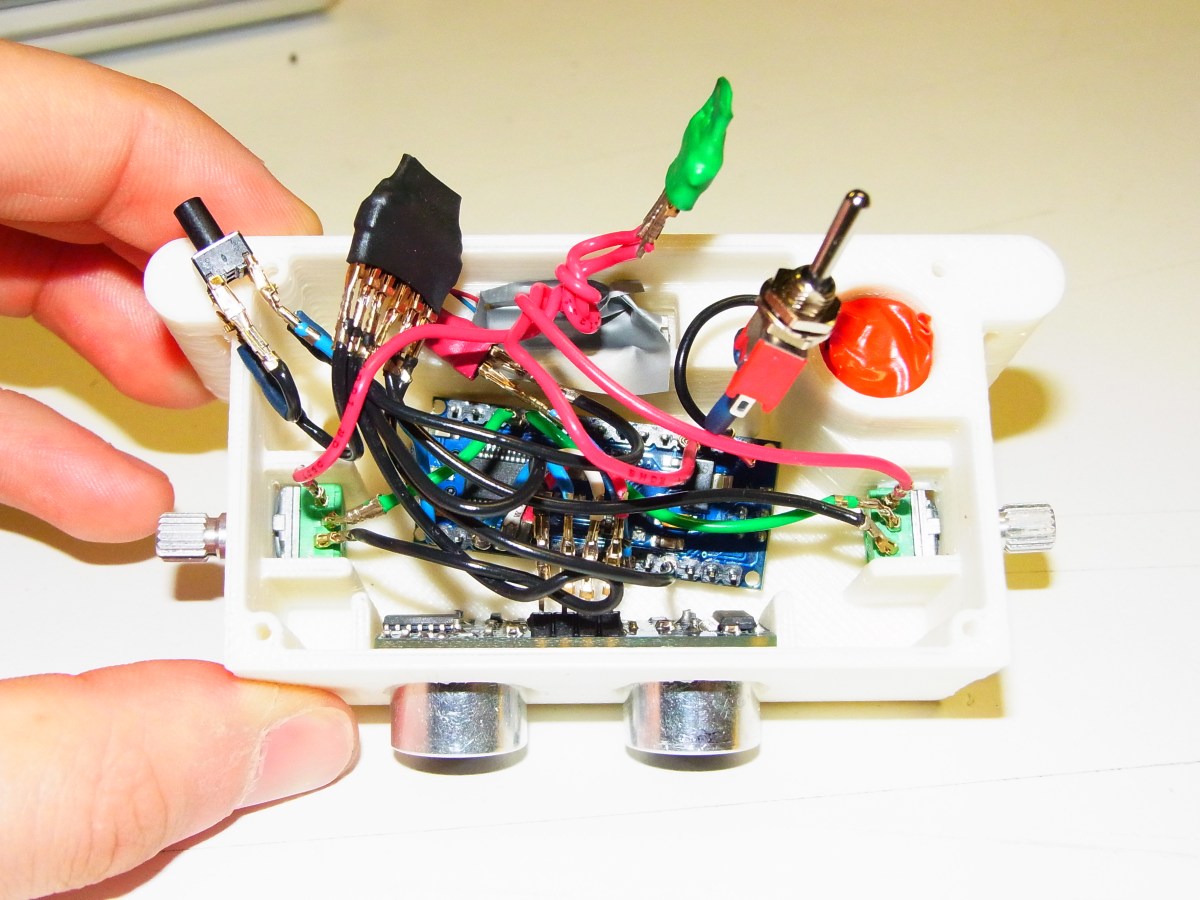
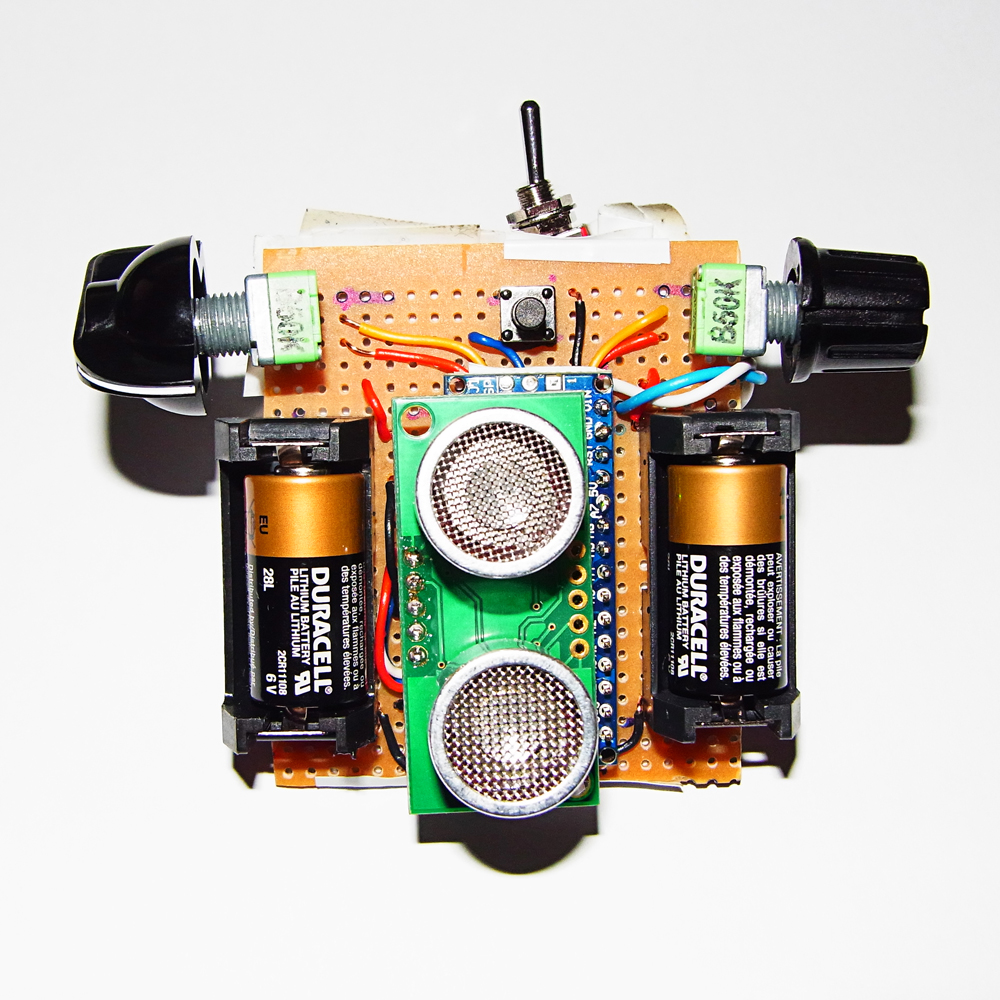
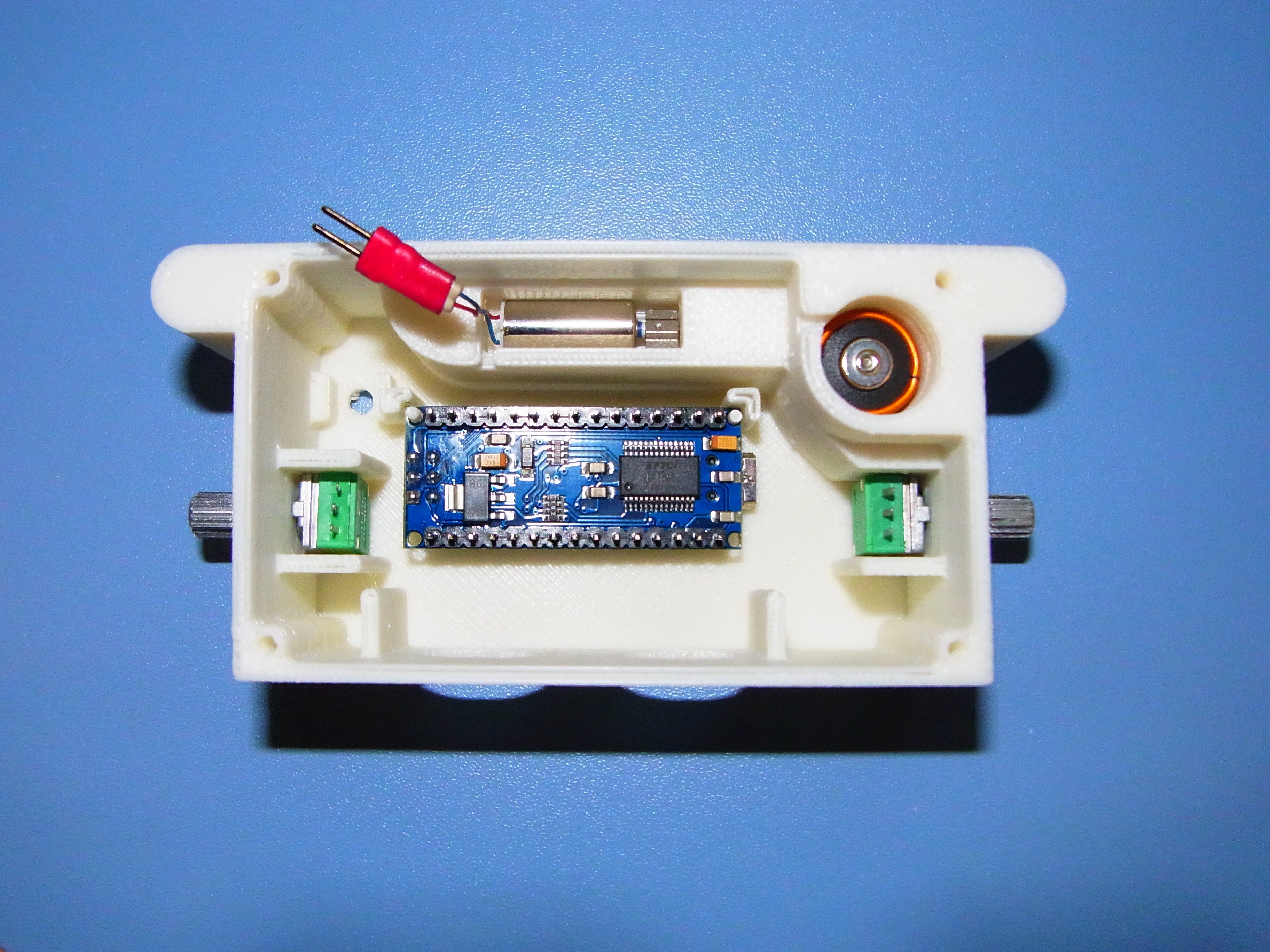
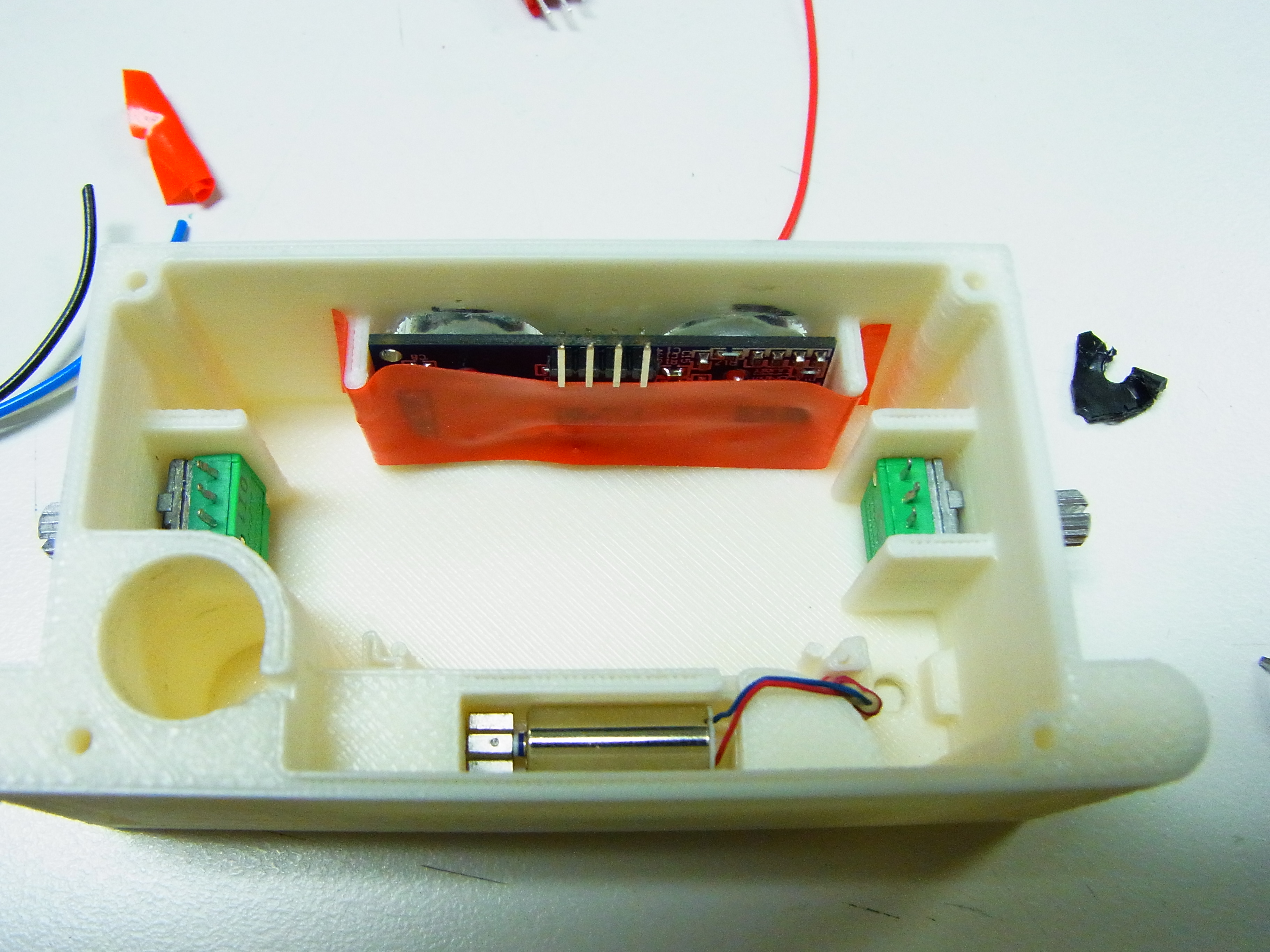
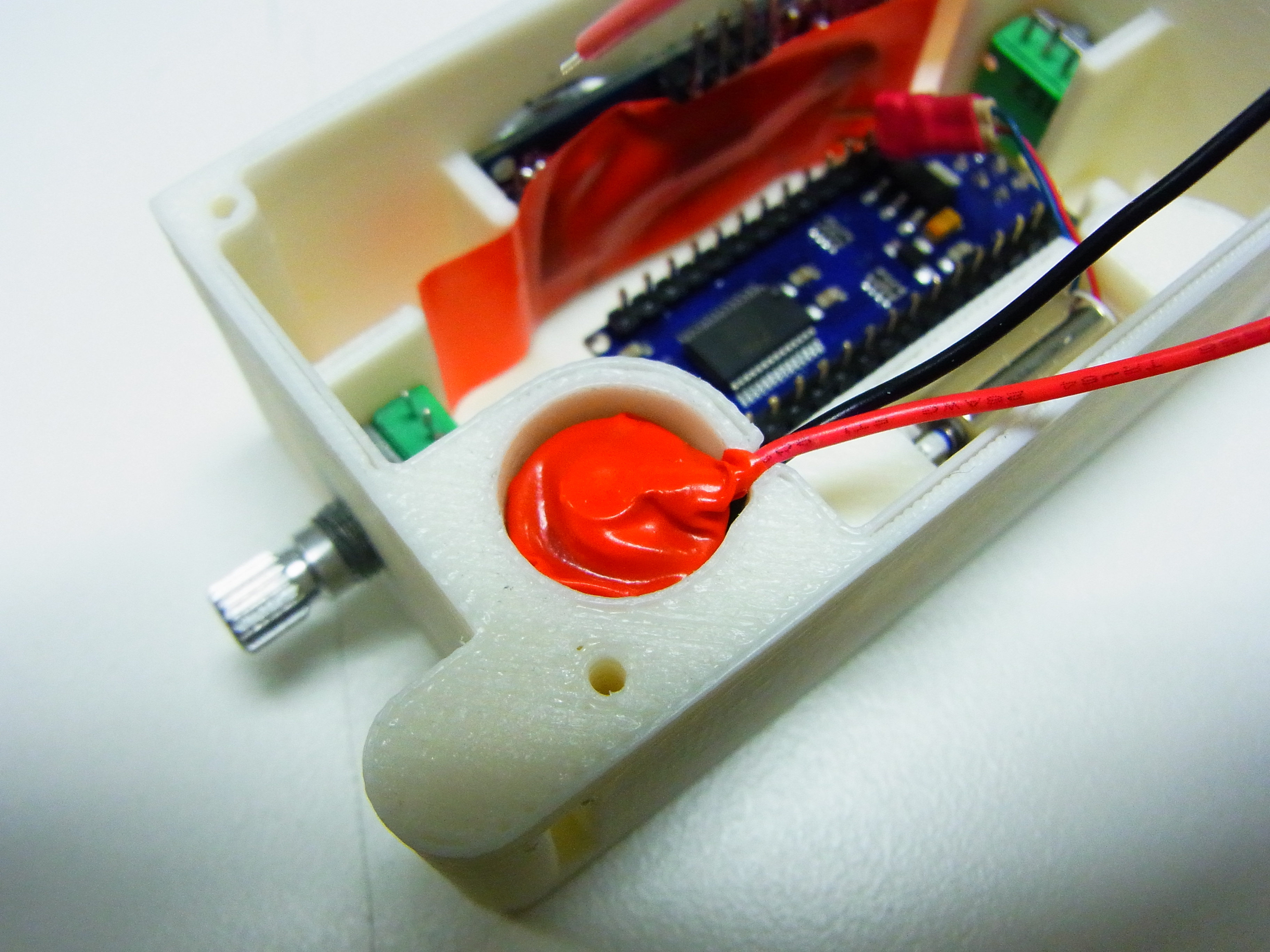
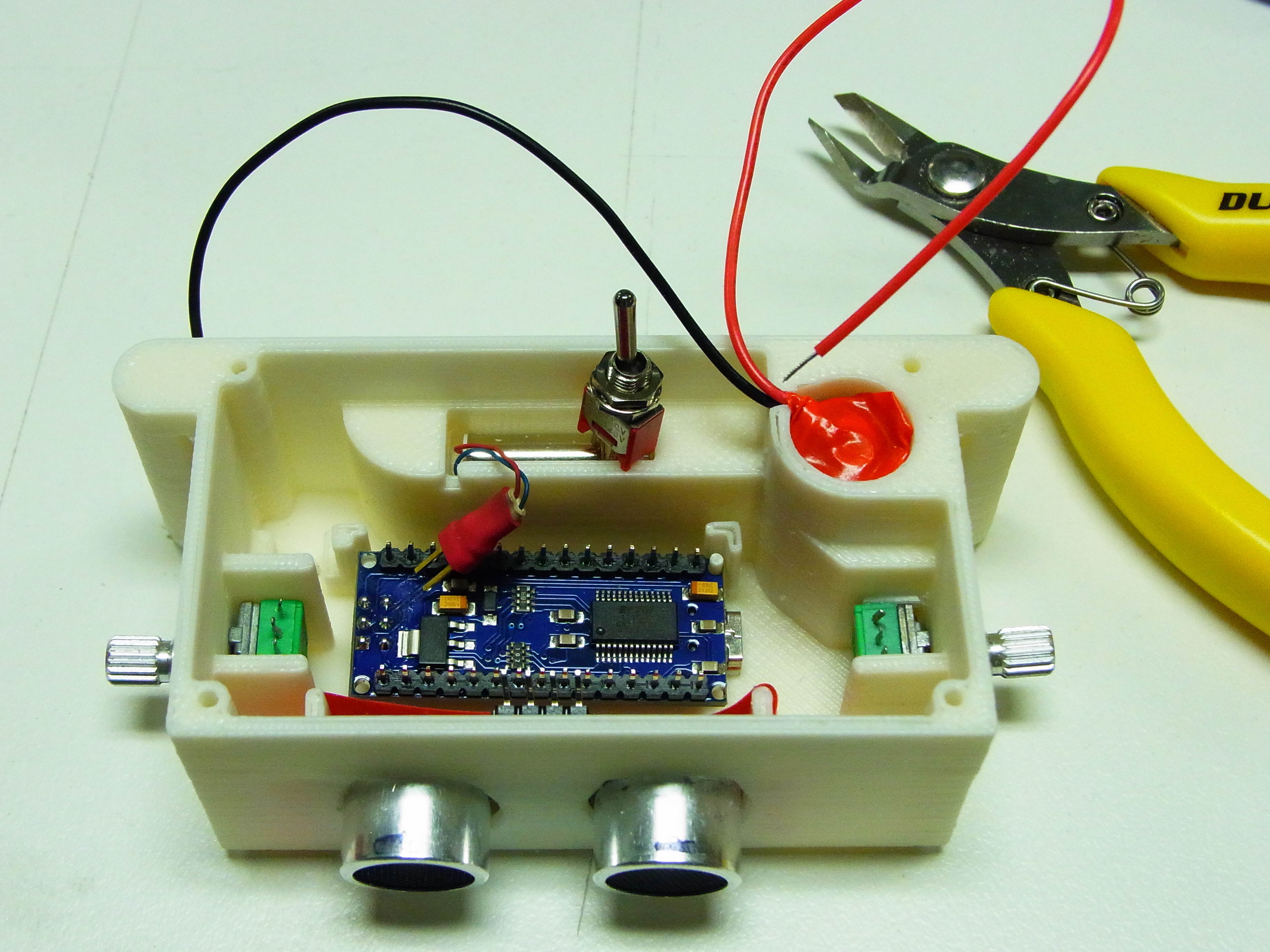
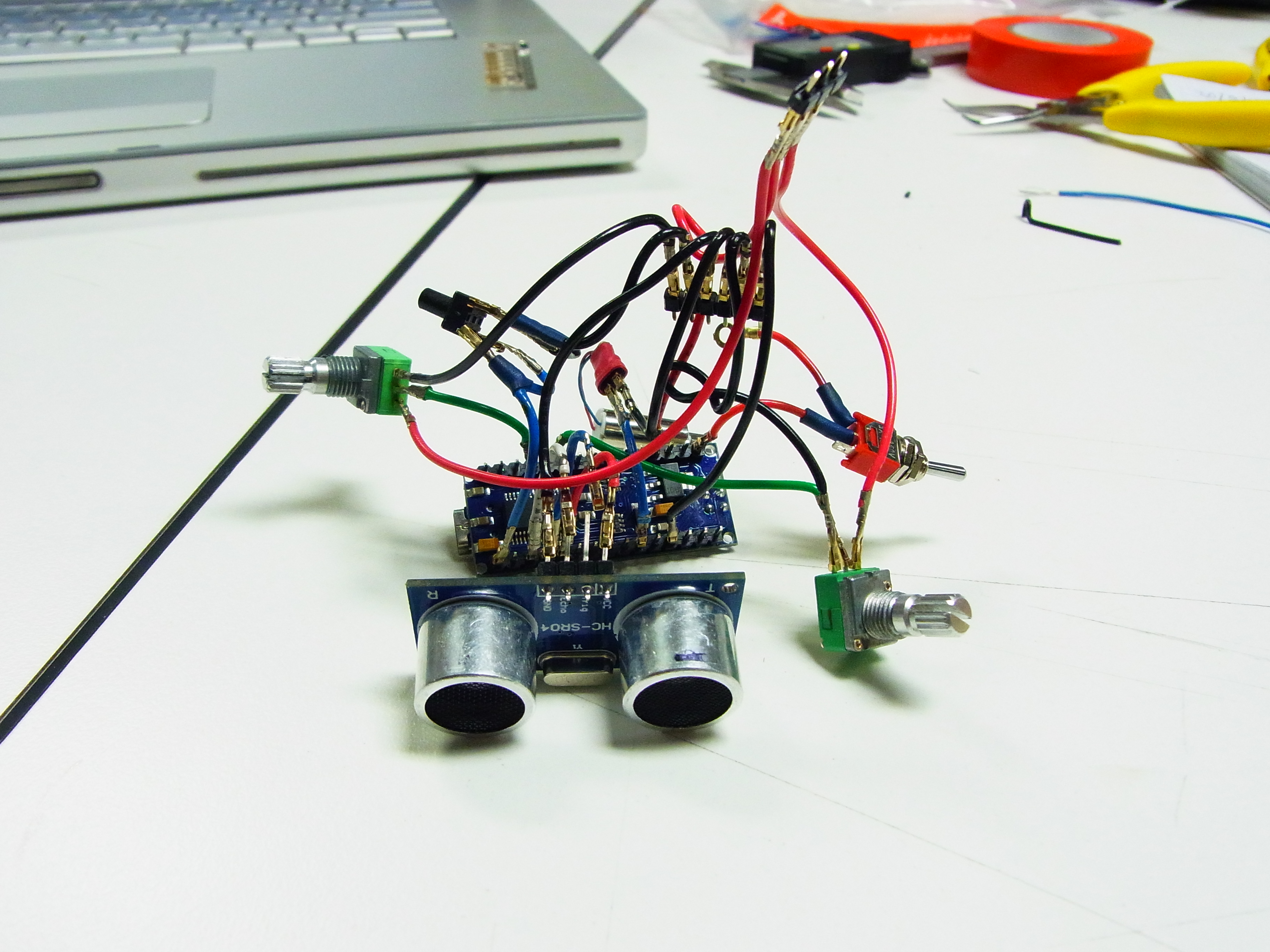
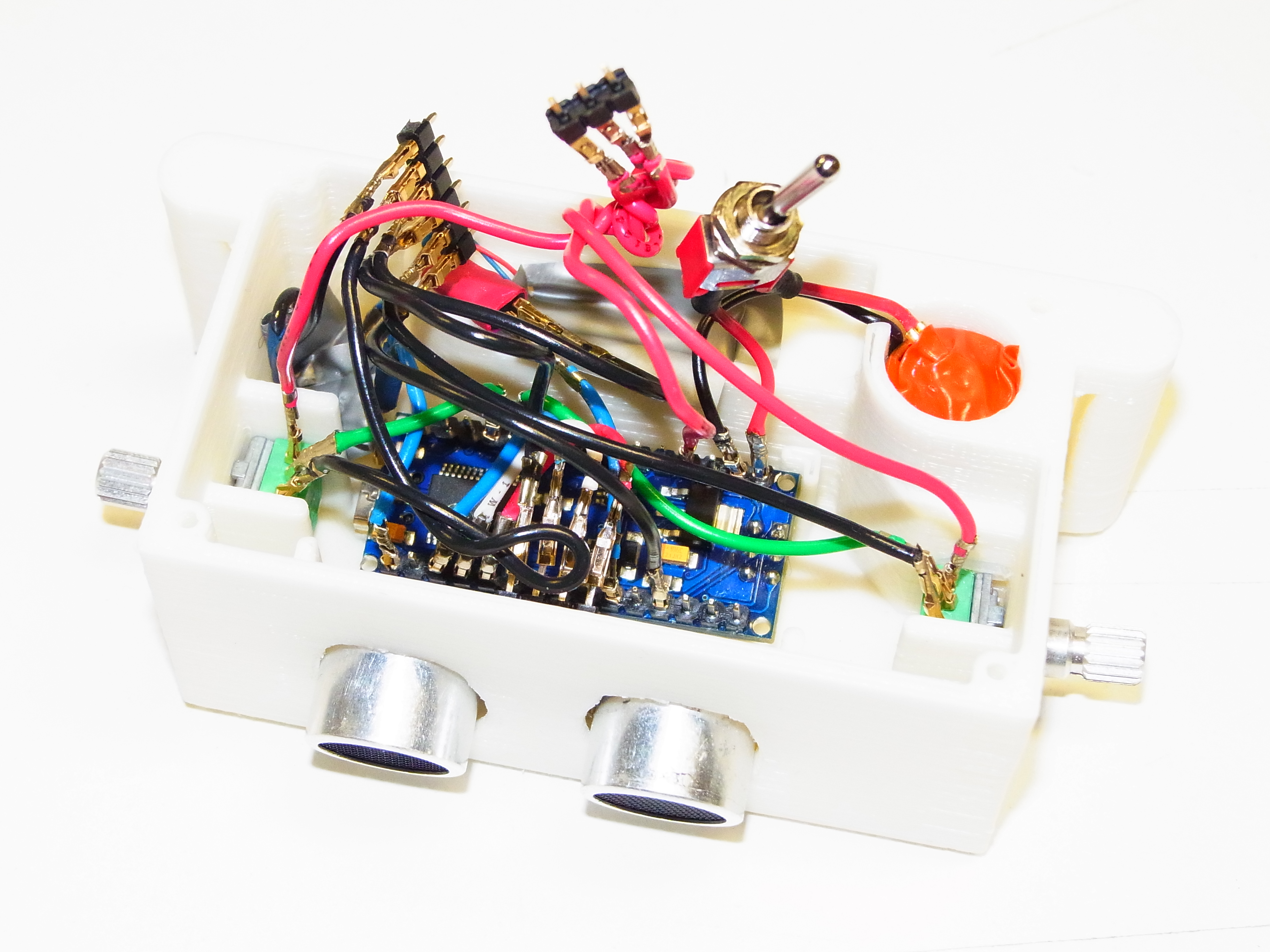
Images of the first module build, from CAD render to 3D printed housing to wiring assembly. The final outcome is an unsuccessful module. It will require disassembly and reassembly outside of the housing to debug and diagnose any problems. Stay tuned…






Title Count: 11 words
Abstract:
Low Vision (LV) is a form of vision impairment that involves irreversible vision loss; it is significantly reduced vision but not blindness and is still usable vision. According to the World Health Organisation, LV affects 246 million people worldwide and their Quality of Life.
The findings of a study of LV, its effects on an individual’s functional independence and available assistive technologies, showed that:
How can both of these findings be addressed to positively impact the interaction of a LV user with their surroundings?
Development of an open-source Haptic Proximity Module (HPM) began with the intention of enabling a LV user to engage their immediate environment for approximately $50 AUD. This approach incorporates off-the-shelf components and can be acquired as a DIY kit or pre-assembled unit, while contributing to the discourse on wearable assistive technologies (AT).
Abstract Count: 196 words
Keywords: Assistive Technology (AT), Do-It-Yourself (DIY), Low Vision (LV), Haptic Proximity Module (HPM).
Keywords Count: 12 words
Here is the code for Project Anders.
Code was initially developed by a friend of mine:
Using the Ping library available form http://arduino.cc/playground/Code/Ping, also have a look at the tute: http://arduino.cc/en/Tutorial/Ping/
Note: I am using the cheaper HC-SR04 ultrasonic sensors, in order to use the Ping library and code you can bridge the Trig and Echo pin. If you’d rather use them separately use this library: http://jaktek.com/wp-content/uploads/2011/12/Ultrasonic.zip from http://letsmakerobots.com/node/30209
initial CODE:
//Written by Anders from Anders.com.au
// these arrays are looped through, make sure your pinb and motor match.
// so mypin[1] should corrispond to mymotor[1] and so on
int myPins[] = {6}; // map the pins for the Ping Sensors
int myMotors[] = {9}; //map the pins for the Vibration motors
int howmany = 1; //number of sensors and motors
void setup() {
// initialize serial communication:
Serial.begin(9600); // this just means you can output to the serial panel
}
void loop()
{
// establish variables for duration of the ping,
// and the distance result in inches and centimeters:
long duration, cm;
// loop through the pins array, noting theat we’ve set the limit to 5
int i; // define “i” this is used as a count variable
// start a count loop, since you know how many sensors there are, hard code this in the i < NUMBER OF SENSORS bit
for (i = 0; i < howmany; i = i + 1) {
// print out what pin
// Serial.println(myPins[i]);
// The PING))) is triggered by a HIGH pulse of 2 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
// check the pin pMyPin[i]
pinMode(myPins[i], OUTPUT);
digitalWrite(myPins[i], LOW);
delayMicroseconds(2);
digitalWrite(myPins[i], HIGH);
delayMicroseconds(5);
digitalWrite(myPins[i], LOW);
// The same pin is used to read the signal from the PING))): a HIGH
// pulse whose duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
pinMode(myPins[i], INPUT);
duration = pulseIn(myPins[i], HIGH);
// convert the time into a distance
cm = microsecondsToCentimeters(duration);
// Serial.print(inches);
// Serial.print(“in, “);
// inches are for americans, they silly.
Serial.print(myPins[i]);
Serial.print(“-“);
Serial.print(cm);
Serial.print(“cm”);
Serial.println();
if(cm < 100){
analogWrite(myMotors[i],returnfeedback(cm));
// delay(returndelay(cm));
// analogWrite(myMotors[i], 0);
} else {
analogWrite(myMotors[i], 0);
}
} // end of the pin loop
delay(200);
}
int returnfeedback(int cm){
if (cm < 5){ // distance
return 255; // strength
} else if (cm < 10){
return 220;
} else if (cm < 20){
return 190;
} else if (cm < 40){
return 160;
} else if (cm < 80){
return 130;
} else if (cm < 100){
return 100;
} else {
return 0;
}
}
long microsecondsToCentimeters(long microseconds)
{
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the
// object we take half of the distance travelled.
return microseconds / 29 / 2;
}
